原文《5G在城郊智慧农场多机协同作业中的组网研究》发表在《无线通信》杂志。作者是河南农业大学信息与管理科学学院李勇,席磊,王雯龙,时雷,车银超,马新明,中信科移动通信技术股份有限公司李超。
对单台农机作业技术的研究逐渐趋向成熟,鲜有看到对多台农机联合作业通信技术的研究报道。多台农机作业过程中通过车载传感器不断地采集大量不同种类的数据(图像、视频等),5G能否满足这些数据对带宽、时延、速率等传输要求以实现机群协同作业是值得研究的科学问题。
本文经过细致梳理国内外研究现状与动态分析,提出无线通信技术支撑多机协同作业是智慧农场的关键技术特征;当前4G、5G在农场中的覆盖范围与信号强度是否支撑多机协同作业值得研究。本文选取河南新乡国家级某农业科技园区作为实验基地,通过设计实验,测试参考信号接收功率和信号与干扰加噪声比指标,采用车载仪器与手持仪表对4G、5G信号覆盖范围与强度进行实际测量,并将测量数据绘图进行可视化展示与分析,为智慧农场多机协同作业如何采用4G、5G混合组网提供科学依据与指导。
随着工业信息化与城镇化的持续推进,我国从事传统农业生产的劳动力逐渐减少,农业劳动力的老龄化与短缺问题逐渐突显,成为制约农业发展的重要因素。未来谁来种地,用什么设备种地是我国亟需解决的问题,农机作业是重复而繁重的作业,作业环境相对封闭,为无人驾驶农机落地提供了天然的条件。随着国家政策对智慧农业、无人农场的需求倾斜,国内对无人驾驶的需求不断增大,各地都在对无人示范农场、智慧农业进行搭建,以尝试和打通无人化农业的进程。发展以“机器替换人”进行农业生产为主要特征的现代化智慧农业的需求日趋增加[1-2];智慧农业是未来农业的发展方向,是现代农业的高级形式[3-4]。针对农作物种植区域,实现“耕、种、管、收、运”环节的无人化作业需要使用不同种类的自动驾驶农机装备(拖拉机、收割机、运粮车等),其核心优势表现在提高作业精度与效率、提升农户操作体验、降低农户劳动强度与单位面积投入成本等。
单台无人驾驶拖拉机每日作业量达到16hm2,行驶速度也能达到12km/h,高精度作业和全地形适应能力使得自动驾驶相对人工驾驶在每日作业量与行驶速度分别提高约33.3%与50%[5];在红外、导航定位、毫米波雷达等感知技术的辅助下,拖拉机即使在夜间无人驾驶的状态下也能够保证作业效率;自动驾驶农机凭借最优的路径规划减少不必要的行程,有效降低油耗与环境污染的同时,还减少对土壤的压实[6-7]。
农机自动驾驶是指农机设备通过自身安装的各种传感器与通信设备获取车辆周围环境信息与自身空间位置,自主按照预设行驶路线并主动避让障碍物以完成作业的技术[8]。基于地理空间[敏感词]位置测量的全球导航卫星系统(Global Navigation Satellite System, GNSS)和中国北斗导航卫星系统(BeiDou Navigation Satellite System, BDS)的定位技术应用在农机自动驾驶中[9]。
直到1992年,美国Trimble开发RTK系统并将其商业化应用,为GNSS在农业上的应用扫除了障碍[10]。中国关于农机自动驾驶技术的研究始于2004年罗锡文团队,经过十余年的研究,突破了速度线控、主从导航、路径跟踪、自动避障等10余项关键技术,研制出了播种机、旋耕机、收割机、插秧机等无人驾驶农机,在水田场景自动导航方面居于国际领先水平[11-12];而智能网联无人驾驶农机技术在国外暂未有新的技术突破。
华南农业大学、上海交通大学、国家农业信息工程技术研究中心、上海联适导航技术股份有限公司和潍柴雷沃重工股份有限公司等参与了农机导航技术的研究工作[13-17]。虽然各个国家均高度重视自动或无人驾驶农机领域标准化工作,但是,当前国际上还没有统一的规范或标准对农机自动驾驶程度进行分级,也没有对自动驾驶农机采用的通信协议标准、故障率、作业效率、土地利用效率、作业精度等进行测试评价或统一设备接口协议与规范。
车载通信(Vehicular Communication,VC)吸引着各国学者与工程师的眼球。车载通信是由各类不同的通信协议组成,目前各国尚无统一的标准,主流的是以美国为代表的专用短距离通信(Dedicated Short Range Communication, DSRC)技术标准。早在1992年,美国材料试验协会(ASTM)就已经开始针对车载通信制定DSRC技术草案[18]。DSRC技术标准在本质上是IEEE 802.11a标准在5.9GHz频谱上的低开销调整,因此在IEEE 802.11协议族中,DSRC被称为IEEE 802.11p[19],属于无线局域网技术,后续针对DSRC的深入研究较少[20]。然而以中国为代表的基于蜂窝通信技术的LTE-V2X标准已被制定,遗憾的是尚未大规模运用车载通信技术来实施与安全相关的应用,还未进入规模化商业应用阶段。与汽车无人驾驶技术相比,农机自动驾驶技术具有行驶速度低、作业精度高(±2.5厘米)、成本低以及耐用性强等特点。
综上,由国内外研究现状及发展动态文献梳理可知,国内外应用于农机群体作业的无线网络通信技术标准尚未统一,已有研究较少涉及农机群体作业的无线网络通信技术及数据传输方法[21-23];对单台农机作业技术的研究逐渐趋向成熟,鲜有看到对多台农机联合作业网络通信技术的研究报道,也没有看到采用哪些新的通信技术的研究报道。
因此,研究无线网络的通信技术与数据传输方法具有重要的理论意义与应用价值。在现代规模化生产条件下,为了提高作业效率,需要多台自动驾驶农机装备协同作业[5] [23]。在国家政策的推动下,农村土地迅速流转集中;农业生产即将步入信息化、智能化、无人化作业的新时期,中国智慧农业时代已经逐步开启。
为了实现多台农机协同作业,农机作业过程中通过车载传感器不断地采集大量不同种类的数据(视频、图像等),并且需要对车辆调度、媒体访问、多址接入技术、数据帧传递、服务质量(Quality of Service,QoS)等需求进行管理[24-26],这些数据对优先级、时延、带宽、QoS等要求均不同;如何达到这些数据的特定传输要求,以实现机群协同作业是值得研究的问题。4G、5G、无线局域网(Wireless Local Area Network,WLAN)近年来发展迅速并且得到较为广泛的部署。多台自动驾驶农机装备是否可以通过4G、5G、WLAN进行相互识别与信息交互尚不清楚。本文针对小麦、玉米轮作多机协同作业对通信技术的实际需求,以解决通信技术瓶颈性问题为目标,研究如何采用4G、5G、WLAN混合组网,为多机协同作业提供理论依据与技术支撑,对提升我国农机装备通信技术研发水平和智慧农业的发展具有重大价值和现实意义。
本研究农机群体作业的无线网络通信技术及数据传输方法,首先需要明确农场环境无线通信已有硬件条件是否满足农机作业要求。针对农场位置、占地面积、农作物植株高度、密集程度、绿化树木分布、树木高度、农场附近4G、5G基站位置、高度设计无线测试实验,模型农机移动速度,测试参考信号接收功率(Reference Signal Receiving Power,RSRP)、平均信号与干扰加噪声比(Signal to Interference plus Noise Ratio,SINR),原阳试验基地通信环境测试条件如下:
(1)测试时间:2022年3月19号,9:30~11:50,天气多云,轻微风;
(2)测试终端:华为p40(11.0.0.990SP11)、自主研发的酷测软件(DT_Cool Test 3.0);
(3)测试配速:步行测试平均配速8km/h,乘车测试平均车速30km/h;
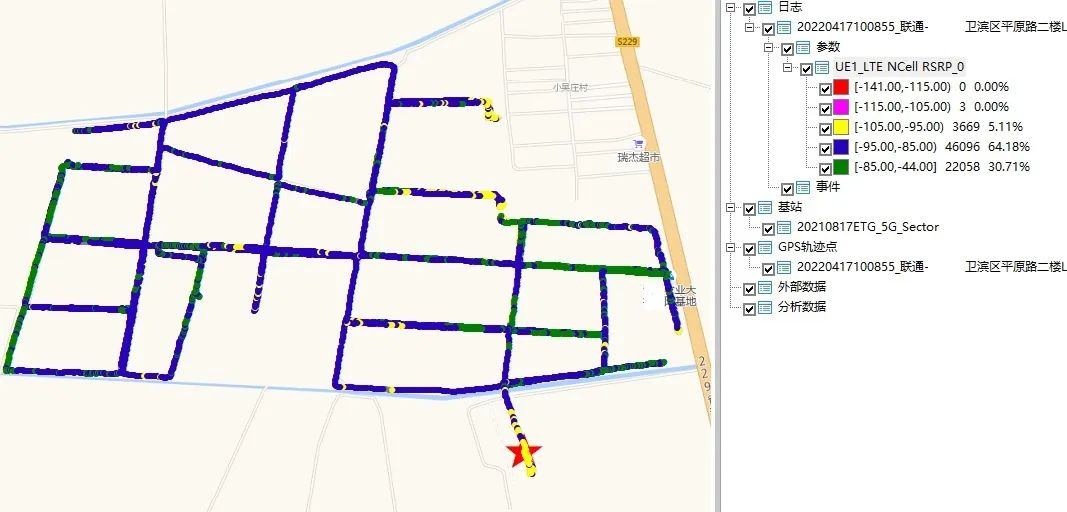
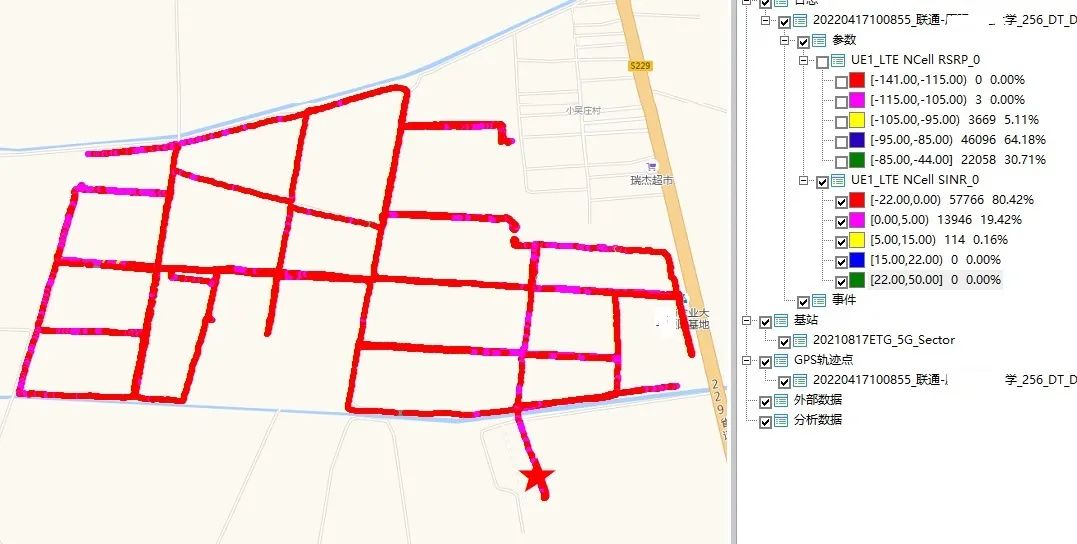
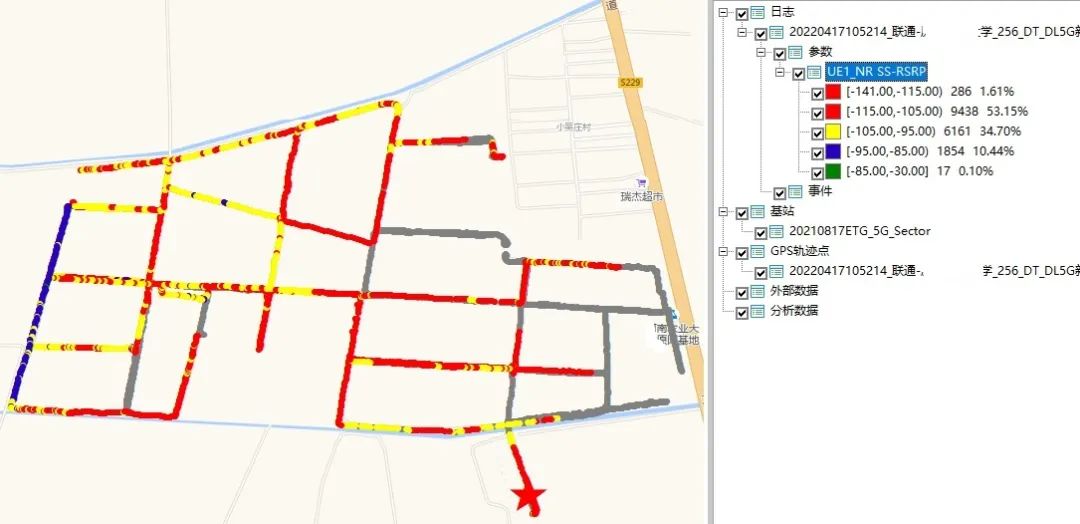
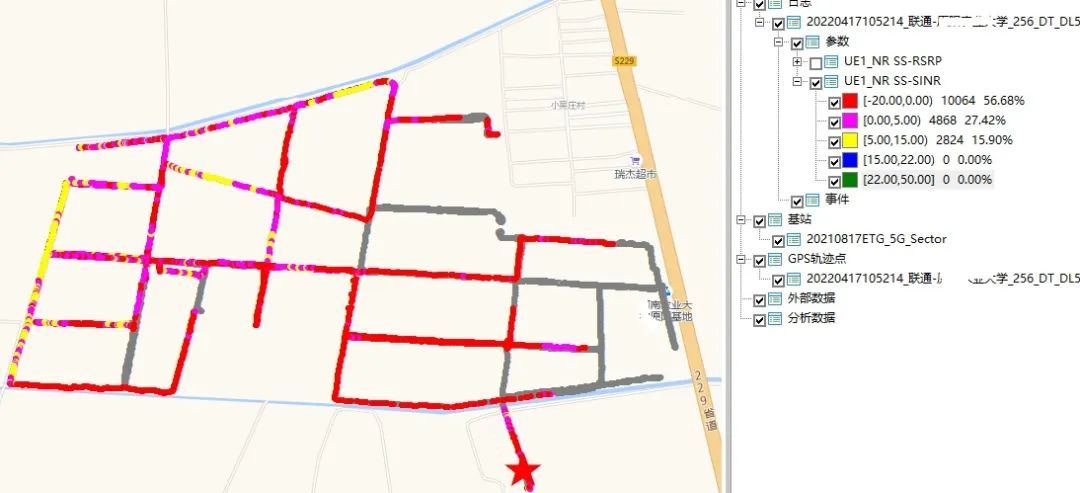
RSRP与SINR是无线信号覆盖的两个最基本指标;RSRP是4G网络中可以代表无线信号强度的关键参数以及物理层测量需求之一,是在某个符号内承载参考信号的所有资源粒子上接收到的信号功率的平均值;SINR是指接收到的有用信号的强度与接收到的干扰信号(噪声和干扰)的强度的比值,亦称为“信噪比”。通过图1~4可知,农场4G信号整体覆盖率约95.82%,4G平均RSRP -85dbm左右,平均SINR 7db左右。现场测试5G基站距离农场约5千米(Km),农场5G整体覆盖率约35.77%,5G平均RSRP -104dbm左右,平均SINR -0.94db左右。
图1~4测试数据表明很有必要研究并设计适配农场的多模态网络与通信模型。针对农场无线信号覆盖环境,采用4G、5G混合的多模态网络结构,农机传感器采集到的数据通过4G、5G传输到基站侧,在基站侧进行汇聚,汇聚后的数据经过运营商公网传输到云端进行处理,经过云端分析之后沿原路反馈给农机设备,农机设备根据指令执行对应操作。
小麦、玉米轮作多机协同作业在速度方面,轮式农机行驶及作业过程中平均运行速度低于30km/h,在旋耕、犁地等作业过程中速度低于20km/h,一般轮式农机属于中低速运行;在时延方面,轮式农机在中低速行驶场景下对时延要求不太严格,日常公网通信环境下,业务要求大数据包时延在17ms之内,小数据包时延在15ms之内,可以满足轮式农机作业需求;喷撒农药、授粉育种用途的无人机飞行速度高于30km/h,属于中高速飞行环境;针对喷撒农药、授粉育种用途的无人机对时延的要求更严格,日常公网通信环境下,业务要求大数据包时延在17ms之内,小数据包时延在15ms之内,因此现有公网通信技术难以满足无人机作业要求,根据无人机作业路径,一方面,需要对现有公网5G基站的天线角度进行调整,增加无人机作业路径所在区域的信号强度;另一方面,增加5G基站部署数量,扩大5G信号覆盖范围。
农场4G信号整体覆盖率约95.82%,4G平均参考信号接收功率(Reference Signal Receiving Power,RSRP)-85dbm左右,平均信号与干扰加噪声比(Signal to Interference plus Noise Ratio,SINR)7db左右。因此,针对实时性要求较低的中低速轮式农机可以采用4G通信模式;由于WLAN中的WIFI-6具有成本低、大带宽、速率快、非授权频段、自组织以及与其他网络共存等优点,针对田间地头固定式图像、视频传感器可以采用WIFI-6进行网站部署,实现多传感器采集到的图像、视频传输到中心节点,中心节点通过运营商宽带传输到云端。
通过实验设计现场测试5G单个基站距离农场约5Km位置,农场5G整体覆盖率约35.77%,5G平均RSRP为-104dbm左右,平均SINR为-0.94db左右。针对农场4G、5G无线信号覆盖情况,应采用4G、5G及WLAN中的WIFI-6混合的多模态网络结构。
农机车载传感器采集到的数据通过4G传输到网络边缘侧;无人机通过5G覆盖区域传输到网络边缘侧;田间地头固定式图像、视频传感器通过WIFI-6传输到网络边缘侧,在网络边缘侧进行数据汇聚,汇聚后的数据经过运营商公网传输到云端进行处理,经过云端分析之后沿原路反馈给农机设备,农机设备根据指令执行对应操作,实现多机协同作业与多种传感器所需的通信支撑。
免责声明:本文采摘自网络,本文仅代表作者个人观点,不代表金航标及行业观点,只为转载与分享,支持保护知识产权,转载请注明原出处及作者,如有侵权请联系我们删除。







 官网首页
官网首页 一键拨号
一键拨号 产品中心
产品中心 联系我们
联系我们