
发布时间:2021-12-29作者来源:金航标浏览:1525
自动驾驶定位技术是实现自动驾驶的关键技术之一。
通俗的说,无人驾驶要解决的根本问题是:现在在哪儿?将要去哪儿?走哪条道儿?
“现在在哪儿”这个问题就是我们今天要讨论的定位技术。一辆无人驾驶汽车只有知道了自车所在位置,再结合周围环境信息与目的地信息,才能决策下一步往哪儿走。
目前用于自动驾驶的高精度定位技术不外乎三种:
1.基于电子信号的定位,例如全球卫星导航系统GNSS;
2.航迹推算,一种基于IMU惯性测量单元的技术,根据上一时刻的位置和方向来推算当前的位置和方向;
3.环境特征匹配,也就是基于激光雷达lidar和视觉传感器的定位,例如lidar的匹配,需要先建立好点云地图,然后将lidar实时采集的数据与点云匹配,来确定车辆当前的位置信息。
这三种方式各有所长,今天我们先来看看GNSS定位技术。
对于GNSS大家可能比较陌生,但如果说GPS或者北斗(BDS)大家就熟悉了。
GNSS(Global navigation satellite system)就是全球导航卫星系统,是个统称,包含了美国的GPS、中国的BDS、俄罗斯的GLONASS和欧洲的GALILEO等。
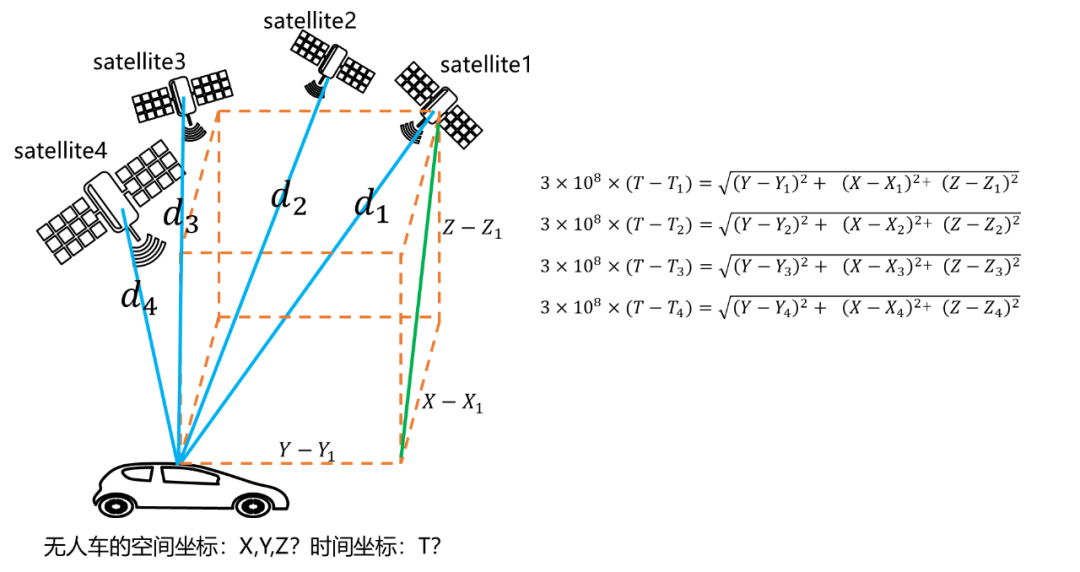
原理很容易理解,就是通过四颗已知位置的卫星来确定地面接收器的位置。我们以GPS为例来解释卫星定位的原理。
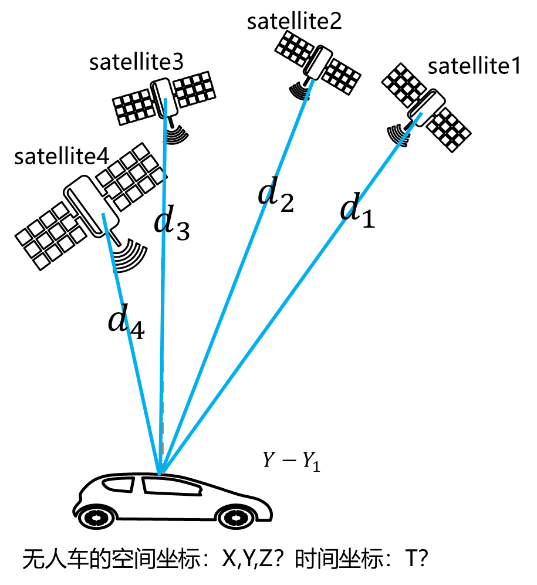
每一颗运行在宇宙空间的GPS卫星,都在不停地通过卫星信号向全世界广播自己的当前位置坐标信息。任何一个GPS接收器都可以通过天线轻松地接收到这些信息,并且能够读懂这些信息,即,四颗卫星的空间坐标已知。
卫星在发送位置信息的同时,也会附加上该数据包发出时的时间戳。GPS接收器收到数据包后,用当前时间(当前时间当然只能由GPS接收器自己来确定了)减去时间戳上的时间,就是数据包在空中传输所用的时间了。数据包在空中的传输时间,乘上传输速度,就可以得到数据包在空中传输的距离,也就是这颗卫星到GPS接收器的距离。即,四颗卫星分别到GPS接收器的距离已知。
根据立体几何的知识,就可以求出GPS接收器当前的位置信息了。
这种定位方式也叫做单点定位或者[敏感词]定位。
GPS定位最难解决的问题是误差。导致定位误差的原因有很多,如电离层导致的,接收设备导致的,遮挡、多径效应产生的。遮挡是接收不到卫星信号。多径效应是不但接收不到卫星直接发送的信号,还接收了由高大建筑物反射而来的信号,这样传播时间就会出错,进而解算的位置也就会出错。
为了提高GPS定位的精度,降低误差,人们通过增加一个已知坐标的参考GPS接收器来提高定位精度,这就是差分定位,也叫做相对定位。
在已知坐标点上布设一个地基增强站(ground-based augmentation system),俗称基站,基站也可以接收到卫星的信号,根据这些信号算出坐标值,然后与已知的坐标作比较,得出偏差量。然后将偏差量通过数传链路(数传链路就相当于数据线,但这根数据线是无线的)或者移动通信网络实时发送给待定位的GPS接收器,待定位GPS接收器根据接收到的信息进行修正,从而提高定位精度。
载波相位差分技术(Real Time Kinematic,RTK)是一种实时处理两个测站载波相位测量的差分方法,简单的说,就是将基准站采集的载波相位发送给无人车的接收机,接收机将本机和基站的载波相位观测值进行求差,解算坐标。一般来说,接收机和基站大部分误差都有时间和空间的相关性,所以绝大部分误差都是可以被抵消或者降低的,在两者距离不远的情况下,载波相位差分可以使定位精度达到厘米级。







 官网首页
官网首页 一键拨号
一键拨号 产品中心
产品中心 联系我们
联系我们